|
I currently lead the Neural Networks team at Matic, supervised by Navneet Dalal. We are building robots that save people time and energy. My interests are: 1. Building easy to use products which solve real problems 2. Designing perception systems 3. Developing accurate & reproducible on-device vision Neural Networks I did my Computer Science Master's studies at Concordia University in collaboration with Liam Paull's Robotics and Embodied AI Lab (REAL) at Mila. I worked on using end-to-end trainable models for recovering the 3D geometry and rendering properties of a scene. I live in the San Francisco Bay Area. I sometimes review for NeurIPS, ICLR & ICML. |

|
|
|
| May | 2023 | ConceptFusion accepted for demo at CVPR 2023 |
| May | 2023 | ConceptFusion accepted at ICRA 2023 PT4R Workshop |
| April | 2023 | ConceptFusion accepted at RSS 2023 |
| April | 2023 | Matician first product launch |
| April | 2022 | Highlighted reviewer for ICLR 2022 |
| May | 2021 | Joined Matician as employee #30 |
| May | 2021 | Defended my Master's thesis & graduated |
| April | 2021 | Our paper titled "Disentangled Rendering Loss for Supervised Material Property Recovery" won the Best Student Paper Award at GRAPP 2021. |
| Nov. | 2020 | We released gradslam: an open-source library for differentiable dense SLAM. |
|
Please see my Google Scholar for a complete list of papers. |
|
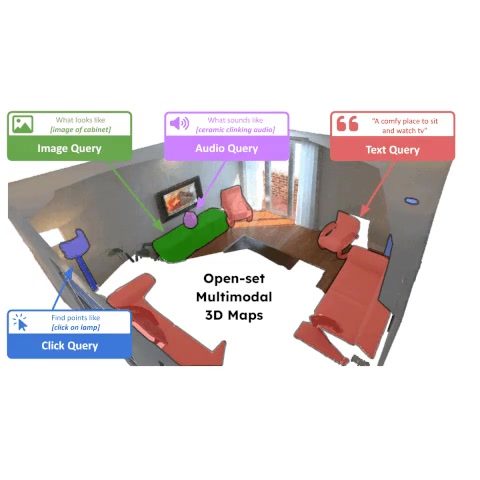
Krishna Murthy Jatavallabhula, Alihusein Kuwajerwala*, Qiao Gu*, Mohd Omama*, Tao Chen, Shuang Li, Ganesh Iyer, Soroush Saryazdi, Nikhil Keetha, Ayush Tewari, Joshua B. Tenenbaum, Celso Miguel de Melo, Madhava Krishna, Liam Paull, Florian Shkurti, Antonio Torralba RSS 2023 CVPR 2023 Demo ICRA 2023 PT4R Workshop project page / paper / cite ConceptFusion builds open-set 3D maps that can be queried via text, click, image, or audio. |
|
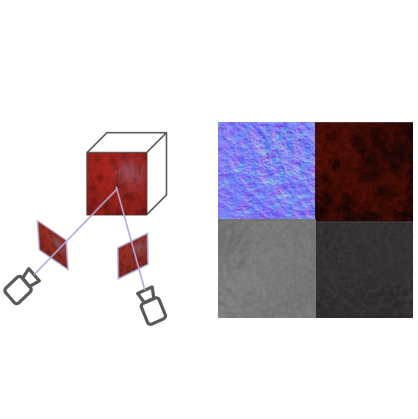
Soroush Saryazdi, Christian Murphy, Sudhir P. Mudur GRAPP 2021 (Best Student Paper Award) paper / cite The disentangled rendering loss can be used in supervised material appearance estimation tasks for recovering more accurate individual BRDF parameters. |

|
Krishna Murthy Jatavallabhula*, Soroush Saryazdi*, Ganesh Iyer, Liam Paull CVPR workshop 2020 project page / code / paper / cite ∇SLAM (gradSLAM) is a differentiable computational graph view of dense SLAM which allows gradients from SLAM outputs to be backpropagated to the input. |
|
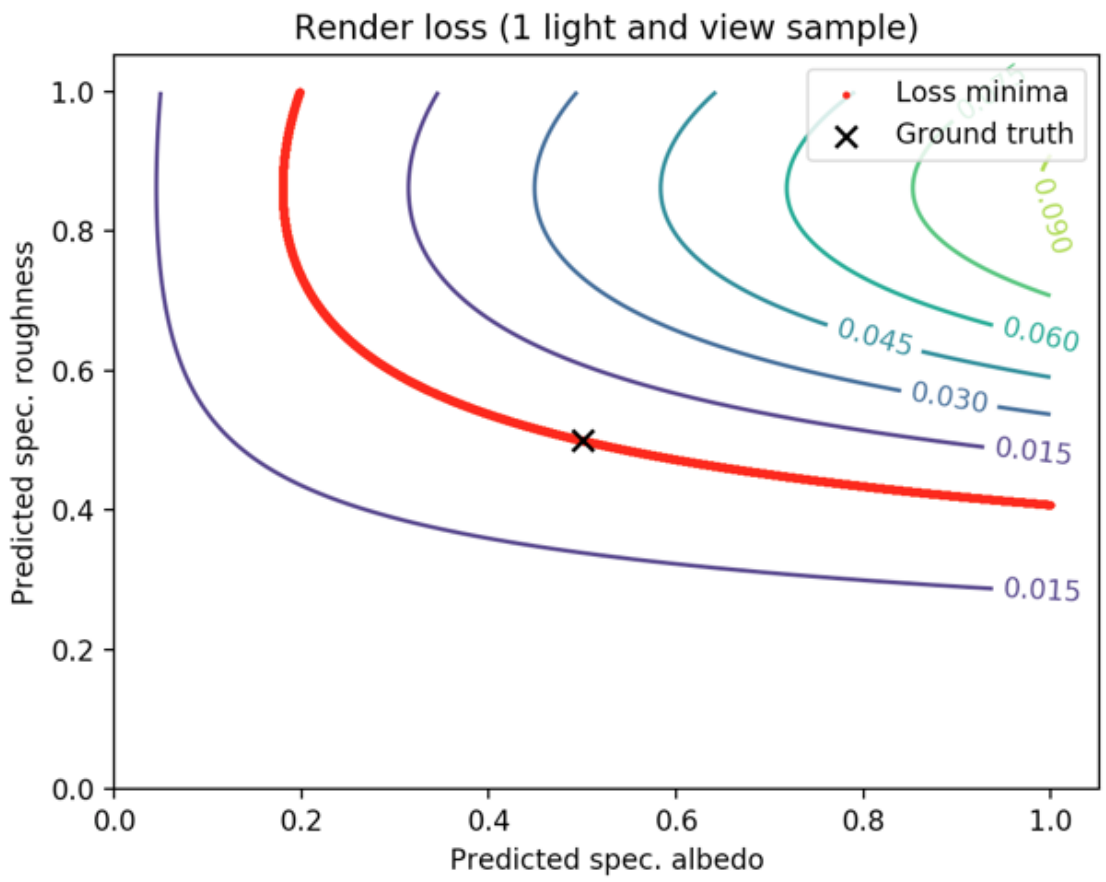
Soroush Saryazdi, Christian Murphy, Sudhir P. Mudur Eurographics workshop 2020 paper / cite We analyze the landscape of the rendering loss and how it can negatively impact the network into estimating less accurate individual BRDF parameters. |
|
Template source code from Jon Barron's website |